

Динамические режимы ременной передачи

Для прогнозирования и расчета статистических характеристик надежности конкретной ременной передачи необходимо возможно более точно знать величины действующих в ней рабочих нагрузок, их частоту и амплитуду, возможность возникновения внезапных пиковых нагрузок, изменения нагрузки на ремень при изменении параметров передачи.
Для составления системы дифференциальных уравнений, описывающих работу передачи в переходных и установившихся режимах работы, схема двухшкивной передачи принята в следующем виде: приводной шкив, к ободу которого приведена масса тпр, включающая массы двигателя, редуктора и собственно шкива; ведомый шкив с приведенной массой твед (массы шкива, натяжных устройств и движущихся частей исполнительного механизма).
Шкивы соединены ремнем массой тр. Упруго-вязкие свойства ремня достаточно точно описываются реологической моделью Пойнтинга-Томсона, частным случаем которой может служить известная модель Фойгта, характеризуемая постоянными Е и n.
Замкнутый контур ремня представляет собой систему с бесконечно большим числом степеней свободы. Движение любой точки ремня описывается нелинейными дифференциальными уравнениями в частных производных, которые могут быть заменены системой обыкновенных дифференциальных уравнений, причем допустимая степень приближения определяется сравнением разностей решений систем двух смежных порядков. При замене уравнений в частных производных системой обыкновенных дифференциальных уравнений предполагается линейно-кусочная аппроксимация искомой функции и ее первой производной.
Составление дифференциальных уравнений движения ременной передачи выполняется на основе уравнений Лагранжа второго рода
За обобщенные координаты принимаем: уо — линейное перемещение шкива трения

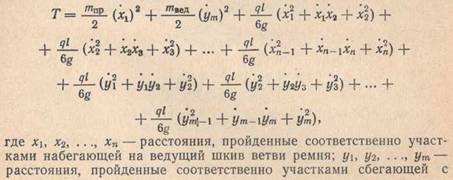
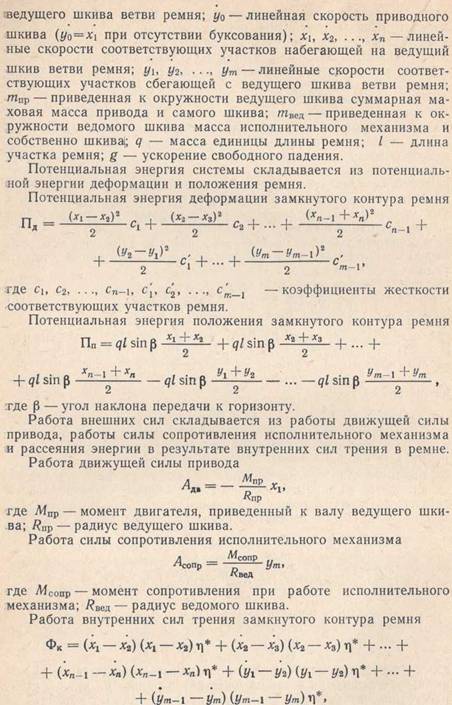
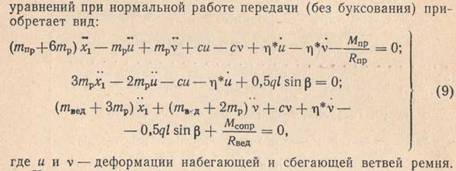
Кинетическая энергия системы Т при отсутствии буксования складывается из кинетических энергий привода и ведущего шкива, замкнутого контура ремня и ведомого шкива с исполнительным механизмом. После соответствующих преобразований получаем
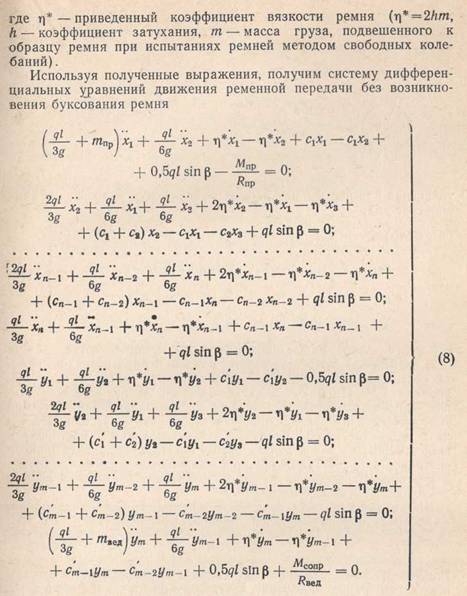
Доказано, что при числе участков 2—4 ошибка в количественной оценке амплитуды динамических деформаций составляет не свыше 5%, т. е. лежит в пределах точности задания исходных данных и точности решения, в том числе на ЭВМ.
При сокращении числа участков до 4 расчетная схема передачи будет выглядеть как на рис. 1, а система дифференциальных
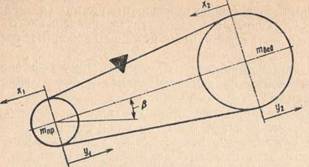
Рис. 11. Принципиальная схема клиноременной передачи
Как известно из общей теории клиноременной передачи, работа передачи сопровождается незначительной потерей скорости, вызванной упругим скольжением ремня по шкиву.
При возрастании окружного усилия до величины, превосходящей запас тяговой способности привода, фрикционная связь размыкается, и в передаче возникает общая пробуксовка (буксование) ремня, являющаяся одним из видов отказа передачи. Передача теряет работоспособность, резко увеличивается изнашивание ремня и шкива, возрастает нагрев ремня и шкива, что может привести к обрыву ремня, воспламенению передачи.
Рассмотрим условия пробуксовки ремня. При нормальной работе передачи формула Эйлера имеет вид неравенства
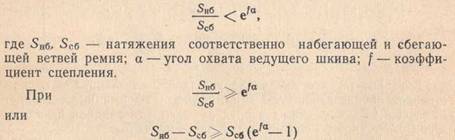
возникает пробуксовка ремня.
При появлении пробуксовки, когда окружное усилие на приводном шкиве превышает запас тяговой способности привода, движение ременной передачи можно рассматривать как движение двух самостоятельных систем (первая система — двигатель и ведущий шкив; вторая система — ремень, ведомый шкив и исполнительный механизм), связанных уравнением:
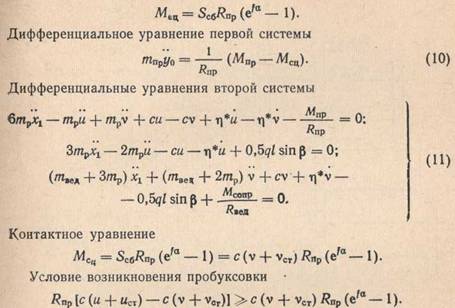
Эти уравнения составлены для случая, когда вся полезная мощность двигателя передается исполнительному механизму через ременную передачу, т. е. ременная передача находится в главном приводе станка или машины. Вспомогательные передачи двигателя внутреннего сгорания (передача вентилятора, генератора, водяного насоса и т. д.) имеют одно принципиальное отличие от основных передач: динамические процессы в ременной передаче практически не отражаются на режиме работы основного двигателя, так как массы ремня и приводимого им механизма на 2—3 порядка меньше массы движущихся частей двигателя, и мощность, передаваемая ременной передачей, составляет малую часть мощности двигателя.
Это означает, что при расчете динамических режимов работы передачи нет необходимости решать первое уравнение системы. Остальные два уравнения остаются прежними.
Система уравнений для передач с числом шкивов, большим двух, составляется подобным образом, возрастает лишь число дифференциальных уравнений.
Решение дифференциальных уравнений движения ременной передачи покажем на примере трех типичных передач:
- основная клиноременная передача металлорежущего станка с ручным управлением — на примере передачи токарного станка 1К62;
- основная клиноременная передача станка с автоматическим управлением — на примере передачи шестишпиндельного пруткового автомата 1А225.6;
- вспомогательная ременная передача двигателя внутреннего сгорания — на примере привода водяного насоса дизеля ЯМЗ-238.
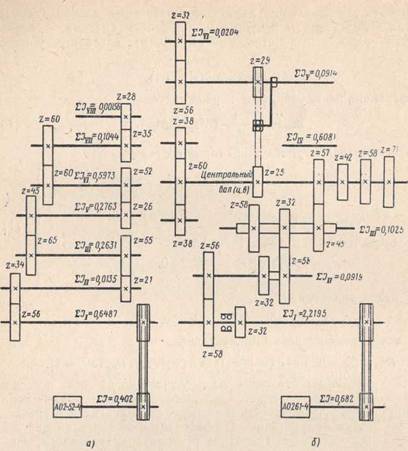
Рис. 12. Кинематические схемы металлорежущих станков с клиноременными передачами:
а — токарно-винторезный станок IK62; б — шестишпиндельный прутковый автомат IA 225.6
Кинематические схемы первых двух передач представлены на рис. 12.
Решение дифференциальных уравнений, входящих в системы, численными методами может быть выполнена лишь с очень большими упрощениями их, безусловно сказывающимися на снижении точности результатов. Достаточная точность решения такого рода уравнений может быть обеспечена применением аналоговой электронной вычислительной машины (электронной модели). Разработаны электронные модели указанных выше передач для решения на электронной моделирующей установке МПТ-9 с использованием комплекта нелинейных блоков и релейных схем.
Структурные схемы решения уравнений представлены на рис. 13 и 14, где приняты следующие обозначения: E — сумматор; J — интегратор; —1—инвертор; МД — магазин делителей; ДВ — дополнительный вход; ФП — функциональный преобразователь, который моделирует пуск асинхронного двигателя; БСН — блок специальных нелинейностей, управляющий релейными схемами; Р — реле; 1Р — контакты реле; 1ШИ — контакты шагового искателя.
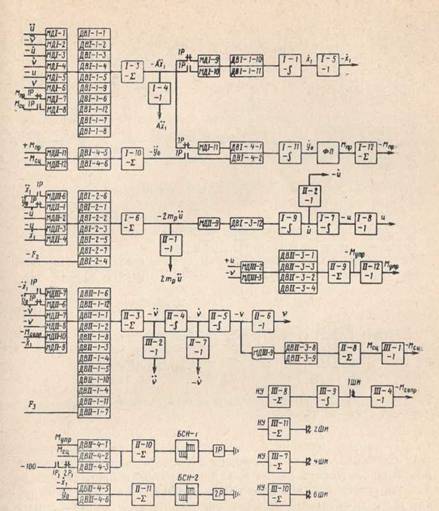
Рис. 13. Структурная схема решения уравнения динамических режимов основной ременной передачи
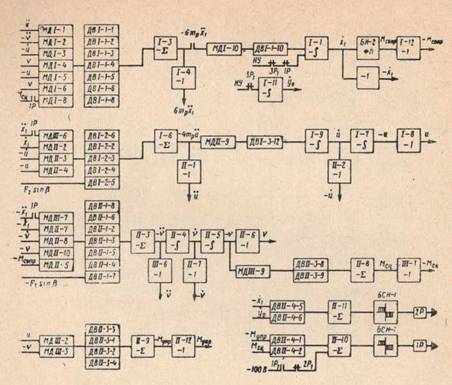
Рис. 14. Структурная схема решения уравнения динамических режимов вспомогательной ременной передачи
В процессе решения в широких пределах, далеко превосходящих реально возможные значения, варьировались следующие параметры: жесткость ремня с, характеризуемая приведенным модулем упругости ЕПр, его вязкость, оцениваемая коэффициентом вязкости n*, предельный момент сцепления Мсц, определяемый начальным натяжением ремня Se и коэффициентом сцепления f.
При реализации системы уравнений на электронной моделирующей установке осциллографировались следующие величины:
деформации u и v и скорости деформаций u и v набегающей и сбегающей ветвей ремня, упругое скольжение ремня по шкиву £, приведенный к ободу приводного шкива момент Mпр, развиваемый двигателем, приведенный к ободу ведомого шкива тормозной момент Мсопр, общее проскальзывание, когда окружной момент на приводном Мпр или ведомом шкивах становится по величине большим, чем момент сцепления Мсц ремня со шкивом.
Для токарно-винторезного станка 1К-62 порядок работы на модели соответствовал режиму работы станка. Производился пуск двигателя вхолостую, затем подключались массы, соответствующие включению фрикционно, далее сопротивление, соответствующее движению резца, затем — черновой обработке, далее — полу- чистовой и чистовой. Для токарно-револьверного автомата порядок включения сопротивлений соответствовал программе работы автомата.
Из рассмотрения осциллограмм видно, что во всех переходных режимах (пуск, включение или отключение сопротивления) в передачах возникают переходные процессы, характер которых определяется особенностями передачи.
Частота колебаний определяется межцентровым расстоянием передачи и упругими свойствами ремня, но зависит от модуля упругости нелинейно.
При разгоне приводного шкива синхронно возрастают деформации набегающей и сбегающей ветвей ремня, вызванные действием центробежных сил.
При включении сопротивления деформация набегающей ветви возрастает, деформация сбегающей ветви падает.
При нормальных условиях работы (предварительное натяжение по ГОСТ и нормальный коэффициент сцепления) пуск и переходные режимы всех передач происходят без пробуксовки, так как все передачи имеют большой запас тяговой способности. Запас тяговой способности передач станков 1К62 и 1А225.6 выше запаса мощности двигателя по предельному моменту.
Аварийное увеличение нагрузки приводит к опрокидыванию двигателя раньше, чем к полной пробуксовке, т. е. исследованные передачи не выполняют одной из своих функций — служить предохранительным звеном между двигателем и остальными элементами станка. Кратковременную (0,1—0,2 с) пробуксовку в начале пуска станка вхолостую и полное буксование при включении рабочих режимов можно получить, лишь снизив момент сцепления Mсц в 5—10 раз против нормального.
Известно, что на показатели надежности клиноременных передач, в том числе на долговечность клиновых ремней, существенно влияет величина перегрузки ремней при пуске и включении нагрузки, оцениваемая коэффициентом режима работы. Значения коэффициентов режима работы, приведенные в ГОСТ 1284—68, даны в очень обобщенном виде и могут использоваться лишь для приближенных расчетов.
Более точно эту величину определяют в результате обработки осциллограмм. Можно выделить два коэффициента динамичности: по моменту сопротивления Km и по деформациям ремня, как отношения максимальных их значений при включении нагрузки к значениям в установившемся режиме работы. Абсолютные значения коэффициентов динамичности для передач металлорежущих станков составляют в нормальных условиях работы Km=1,3~l,5 и Ки =1,1 -
1,15, т. е. несколько выше, чем указано в ГОСТ 1284—68 для подобных передач. Можно предположить, что большее влияние на долговечность ремней оказывает величина Km, так как резкое увеличение момента вызывает в ремне, имеющем значительную вязкость, серьезные перегрузки, приводящие в конце концов к его отказу.
Вязкость ремня существенно влияет на характер работы передачи. Увеличение вязкости резко снижает коэффициент динамичности, время затухания колебаний, повышает деформации ведомой ветви ремня и увеличивает тяговую способность передачи. Это можно объяснить с позиции общей теории передачи трением. Окружное усилие передается на участке, где имеется взаимное перемещение каких-либо элементов относительно шкива, вызванное деформацией ремня. Упруго-вязкое тело, каким является клиновой ремень, характеризуется временным сдвигом между напряжением и деформацией.
За весьма короткое время (сотые доли секунды) прохождения ремня по шкиву изменение деформаций тягового слоя не следует в точности за изменением напряжений в нем, и фактическая дуга скольжения меньше теоретической, причем это различие тем больше, чем выше вязкость ремня. Влиянием вязкости ремня объясняется часто наблюдаемое на практике существенное превышение фактической тяговой способности скоростных ременных передач против расчетной, определяемой для абсолютно упругого ремня. Снижение вязкости ремня увеличивает коэффициент динамичности, облегчает условия возникновения пробуксовки. При нулевой вязкости установившийся режим работы вообще не наступает.
Максимальные мгновенные деформации тягового слоя ремня в переходных режимах передач металлорежущих станков зависят от упруго-вязких свойств ремня и составляют 1,95—2,92% для передачи станка 1К62 и 0,8—4,4% для передачи станка 1А225.
Общий характер работы вспомогательной передачи двигателя ЯМЗ-238 подобен описанному выше. Передача имеет очень высокий (почти десятикратный) запас тяговой способности. Максимальные деформации тягового слоя набегающей ветви ремня в пусковом режиме составляют 0,66—3,0%.